Mechanical Design of Improved Massage Gun
Massage Gun
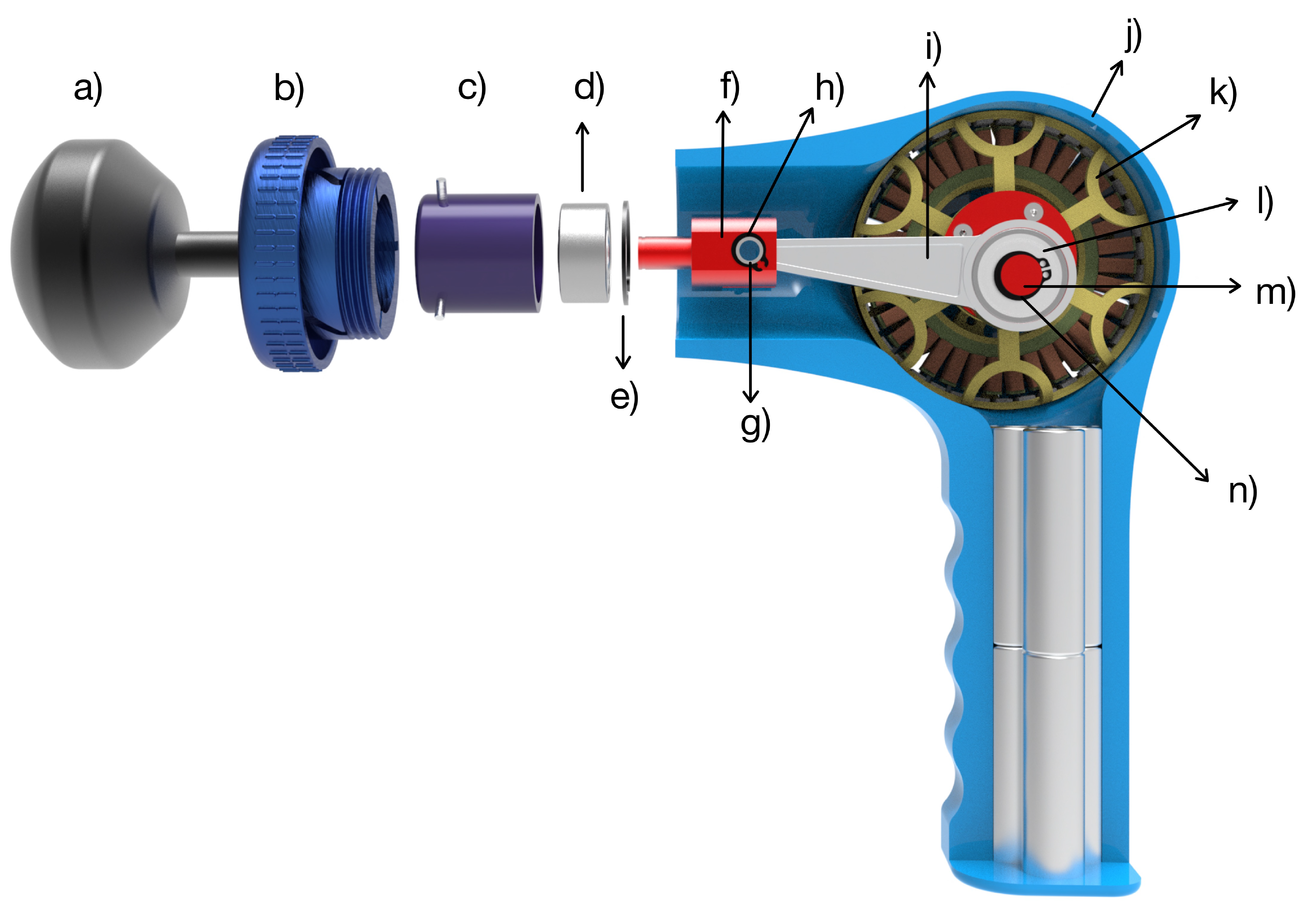
This project aims to design a 2-degrees of freedom (DoF) massage gun for medical and rehabilitation purposes. Unlike traditional models, it features both reciprocating and rotational motions in its head to enhance therapeutic effectiveness. The goal is to create a prototype that improves overall performance and versatility.
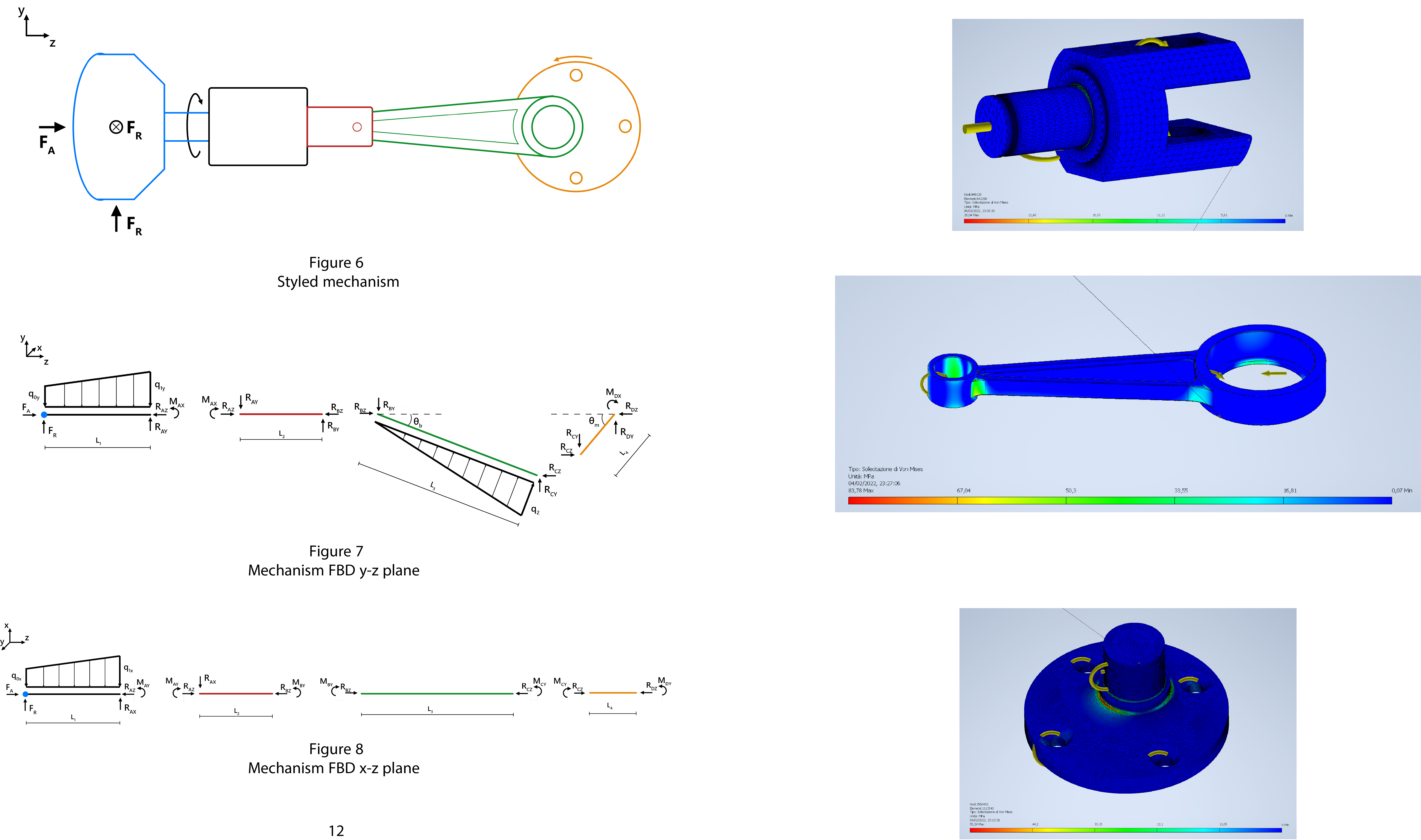
The project started with detailed analysis to define requirements and generated various design concepts. A mathematical model in MapleSim was developed to optimize motor requirements and component dimensions. Structural analysis using theoretical methods and FEM simulations ensured robust design, particularly focusing on bearing dimensioning. A CAD model was then created for 3D printing and validation.
This systematic approach ensures the development of an innovative massage gun that meets rigorous medical and rehabilitation standards.