Modeling and Simulation of a Quadruped Leg
Quadruped Leg modeling
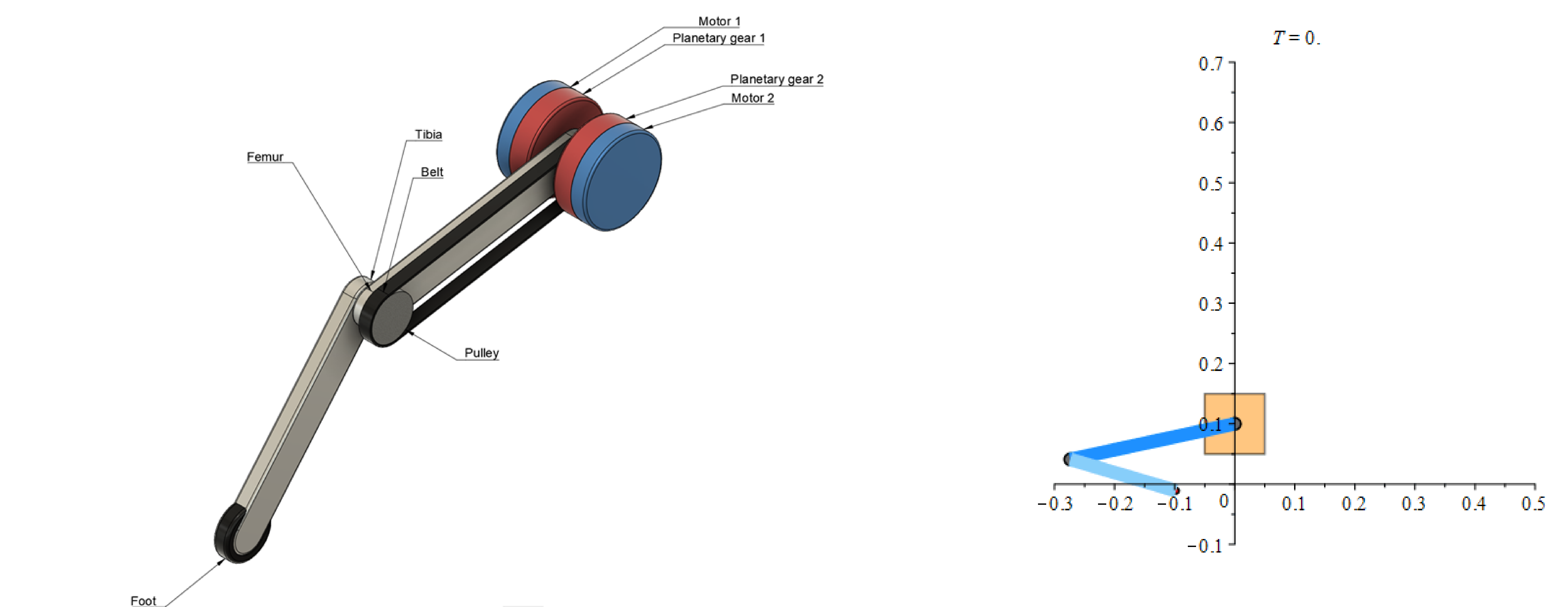
This project centered on developing a comprehensive model for a quadruped robot leg, encompassing several critical phases. It began with the careful selection of an appropriate actuation mechanism, evaluating factors like compactness, power-to-weight ratio, and dynamic controllability. Sensitivity analysis was also performed to assess the system's robustness against production errors.
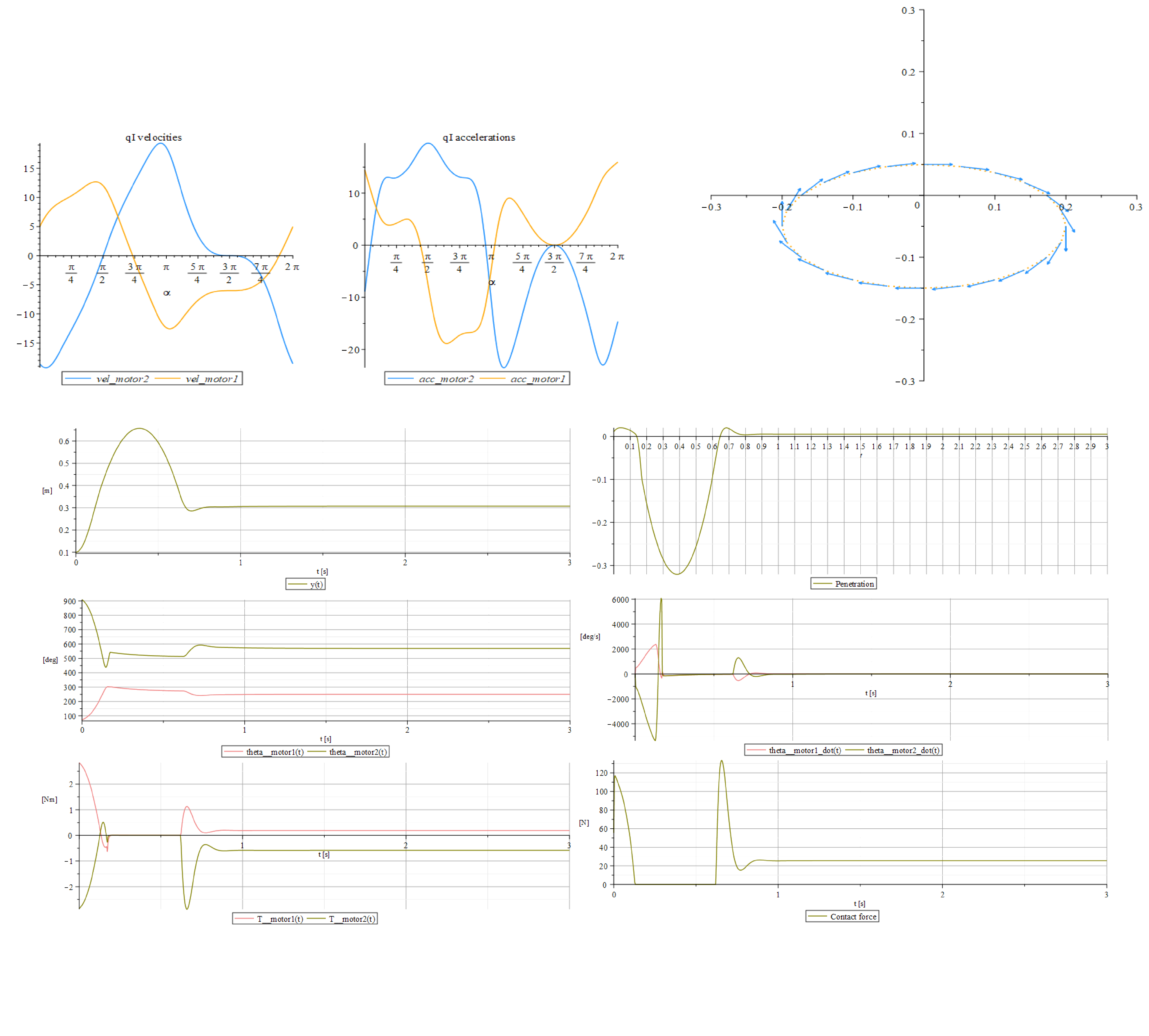
Subsequently, a dynamics analysis delved into the forces, torques, and accelerations experienced by the leg during movements such as drops and jumps, common in quadruped locomotion. This phase provided insights into the leg's stability and performance under varying conditions.
To optimize performance, parameters such as link lengths, joint stiffness, and actuator characteristics were fine-tuned. This optimization process aimed to maximize the leg's capabilities, particularly in tasks like jumping, by balancing factors such as torque limits and mechanical dimensions.
The project utilized Maple and MapleSim environments extensively, leveraging their capabilities for mathematical modeling and simulation.