Modular Drone Part 2
Anything Can Be a Drone

In recent years, the use of drones has increased in a wide range of applications, including delivery, inspection, and mapping. However, the limited flight time of drones and the need for rapid battery replacement or recharging has become a major challenge for their extended use.
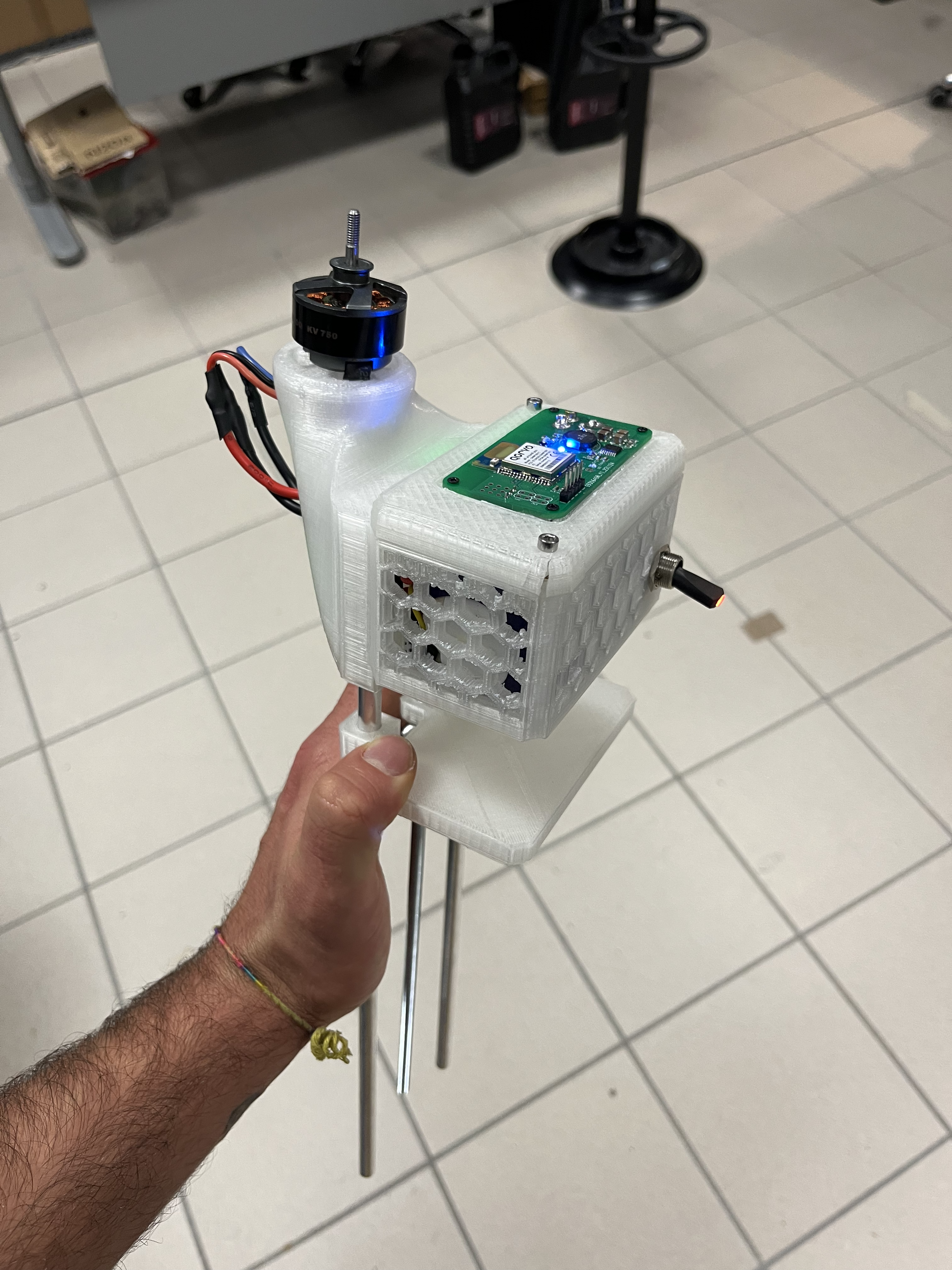
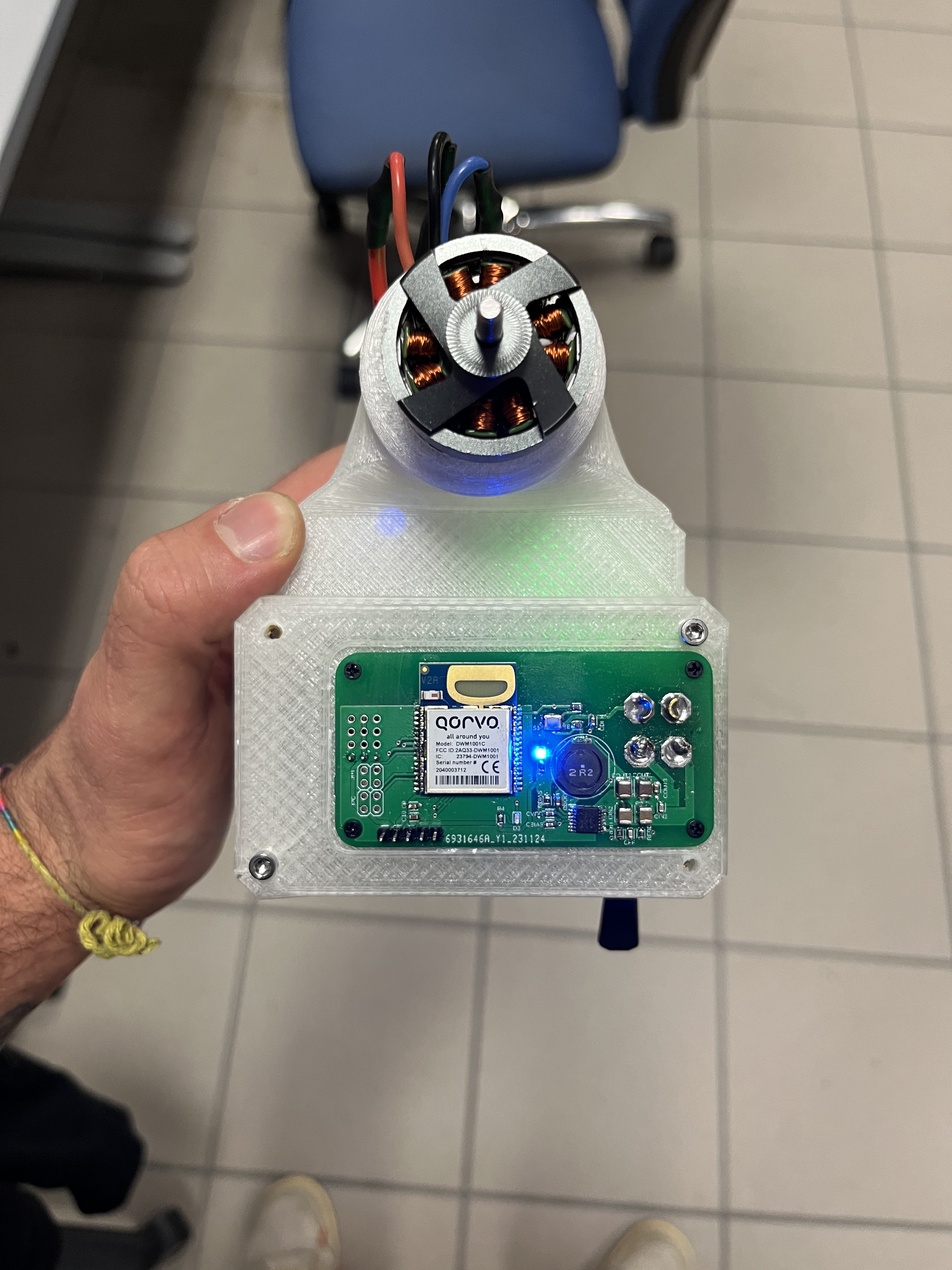
Our idea is to apply a modular approach in which various modules containing the propulsion system can be attached to an arbitrary frame to make it fly. Specifically, our goal is to physically make the modules that will make up the drone. For these it was necessary to draw and design the PCB, make the 3D model and print it.
We believe that our proposed method, utilizing UWB technology, will be a key step forward in the development of efficient and reliable drones that doesn’t have any geometric constraint.