Whole Body MPC Quadruped Locomotion
Whole Body MPC
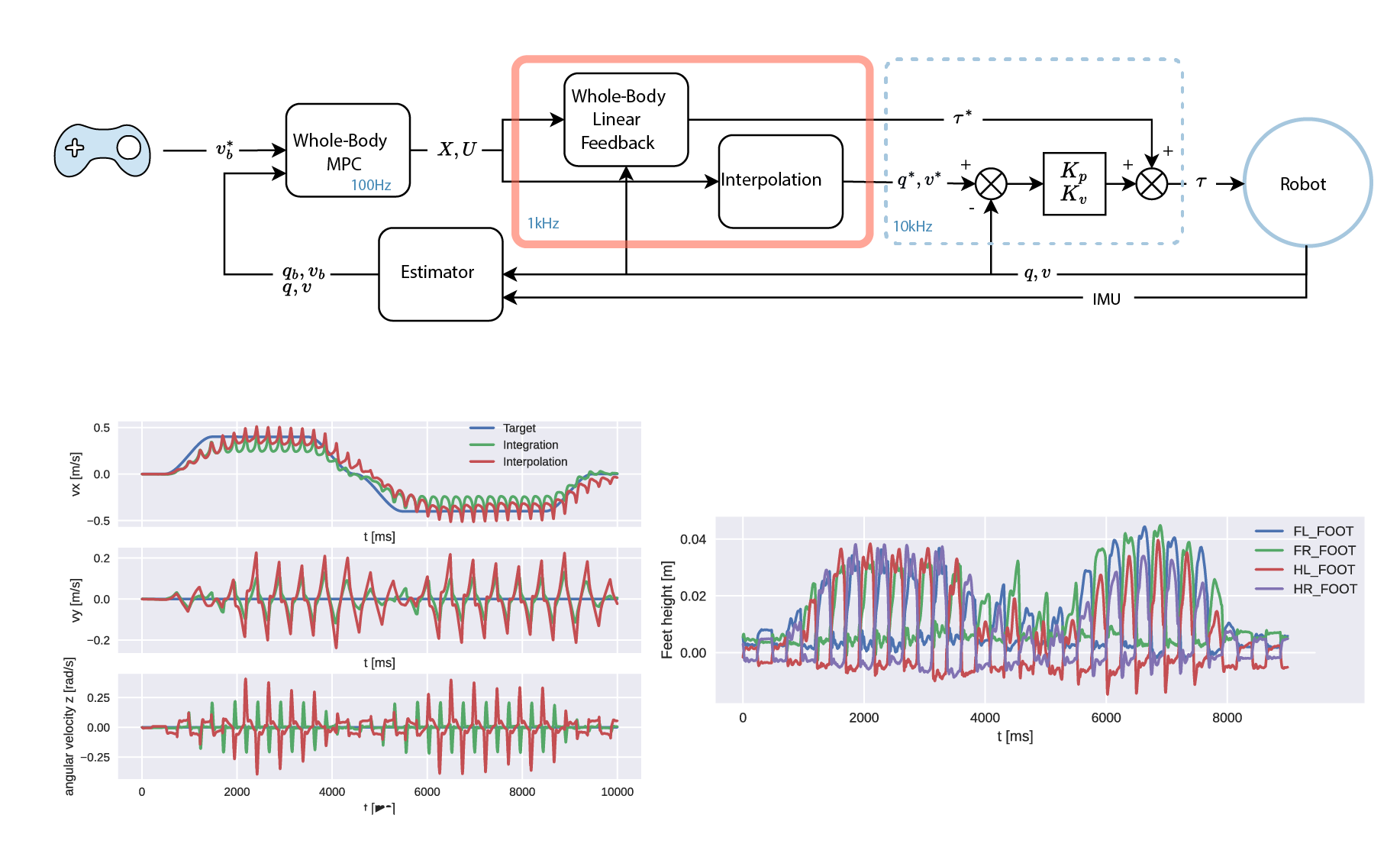
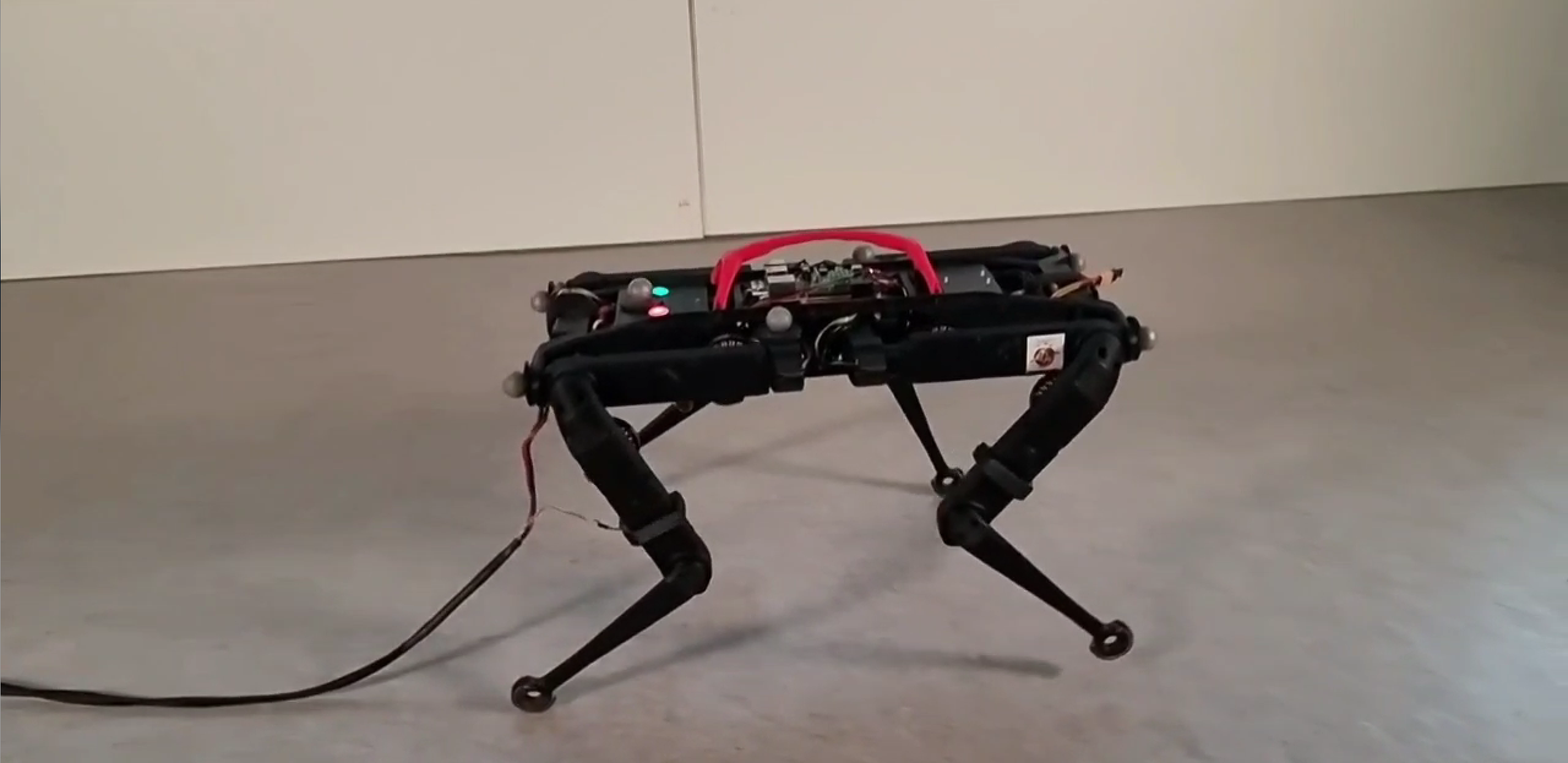
The project aimed to develop a novel Whole-Body Model Predictive Controller (MPC) for the locomotion of the quadruped robot Solo12, focusing on dynamic and versatile movements without predefined foot references. The Whole-Body MPC was designed to handle complex robot dynamics by formulating the control problem as an optimization task, considering system dynamics, kinematics, and actuator limits.
To stabilize the system, a high-frequency Low Level Controller (LLC) was implemented as a PD+ controller, using position and velocity references from the MPC and incorporating Riccati gains for feedback. A significant innovation was eliminating predefined foot trajectories, instead dynamically adjusting foot positions based on required forward velocity through a cost term in the MPC's cost function.
Extensive simulations and real-world experiments validated the controller's performance, allowing for assessment and fine-tuning in various scenarios. This approach ensured effective dynamic and versatile locomotion for the Solo12 robot.