DQN Tensorflow Implementation
DQN Implementation
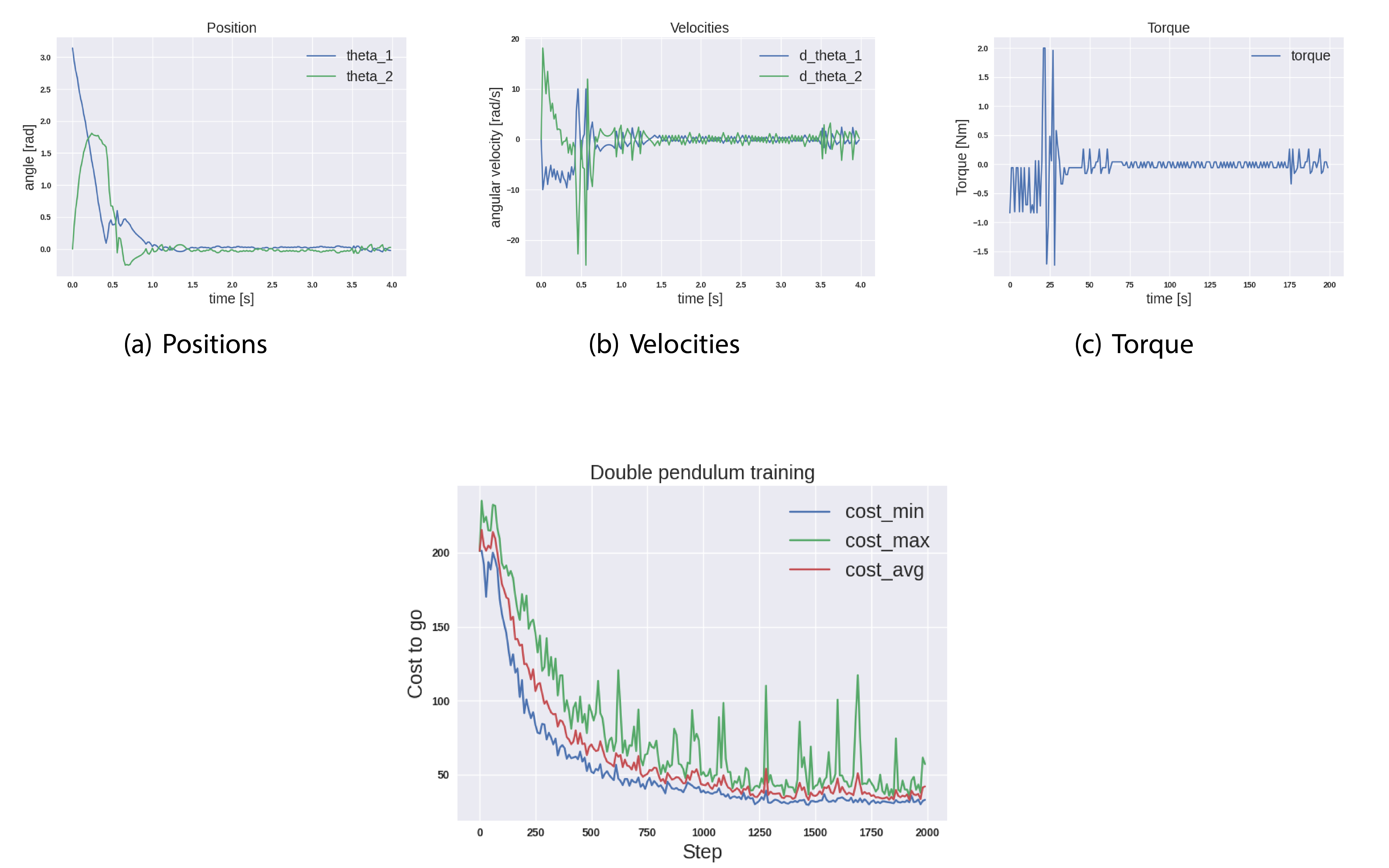
This project aimed to implement and train an agent using the Deep Q-Network (DQN) algorithm to control the swing-up maneuver of a double pendulum, which consists of two connected rods where the second rod's motion depends on the first rod's position and velocity. The agent's task was to manipulate the torque applied to the first joint to stabilize the pendulum in an upright position.
After training, I evaluated the agent's performance through simulations and fine-tuned the DQN algorithm by adjusting hyperparameters, network architecture, and exploration-exploitation strategies to enhance the agent's control and stabilization capabilities.