MPC Teaching Lecture
MPC Mobile Robot
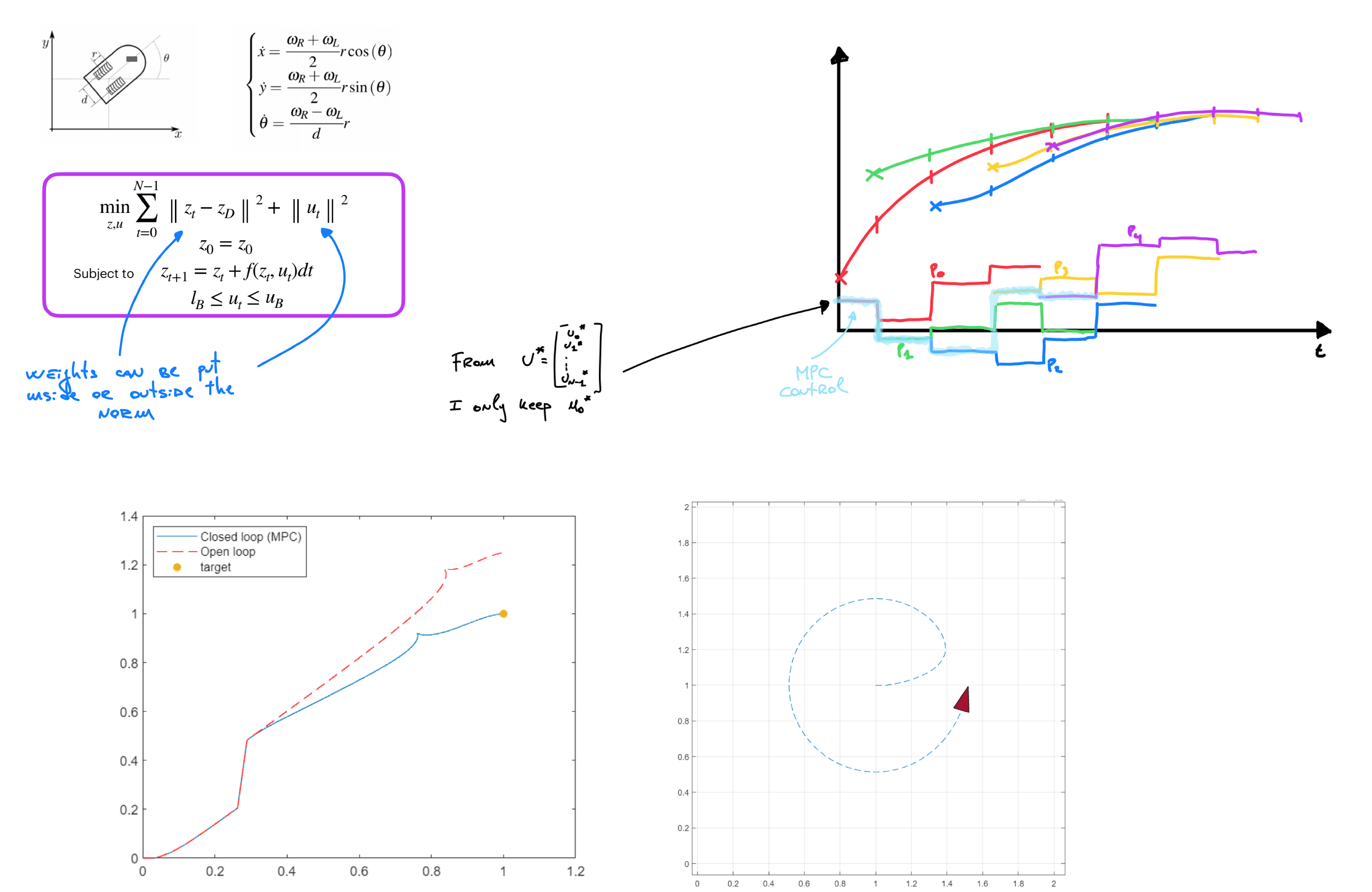
During a a course in mobile robots, I led a teaching session on Model Predictive Control (MPC) applied to a unicycle, chosen for its simplicity. The goal was to introduce other students colleagues to MPC principles and demonstrate its practical application in controlling nonlinear systems.
The session covered MPC fundamentals, mathematical modeling of the unicycle dynamics, formulation of MPC problems, and hands-on implementation using software tools. Visual aids and simulations were used to illustrate concepts, and interactive Matlab exercises were designed to deepen understanding and application of MPC in real-world scenarios.