Hello
I’m Alessandro, nice to meet you 🤙
{}



Know Me
Hi, happy to see you here.
I am Ale, I'm a Master Degree student in Mechatronics Engineering, major in robotics. Mainly focused on optimization based robot control, I am also very passionate about complex dynamical systems in general. I have background in Reinforcement Learning for manipulation tasks and in Model Predictive Control for locomotion.
With a mechatronics background I also have experience in writing firmware for microcontrollers, PCB and CAD design.
Hobby wise, I have been playing rugby for more than 10 years in A League, I also like running, hiking and snowboarding. As a fellow italian I also like cooking and BBQing.
Hard Skills

Python
Programming language I used the most for high level purposes
C
Programming language I used for low level control. Mainly used for firmware
PyTorch
Used extensively during my MS thesis on Reinforcement Learning to leverage CUDA acceleration.
Dynamics System Modeling
Compute kinematic trees: forward and inverse kinematics, dynamics equations of motion, sensitivity analysis
Optimization Based Robot Control
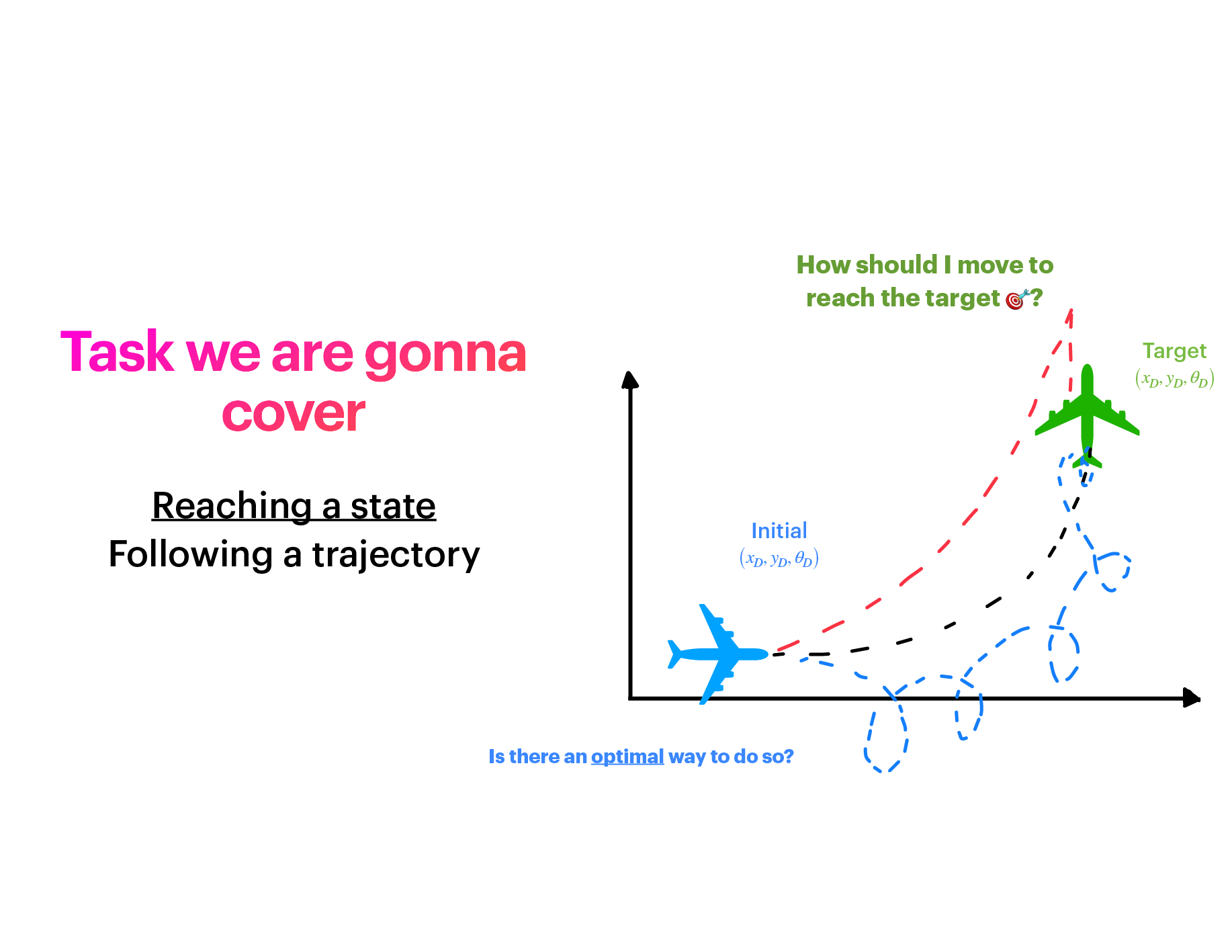
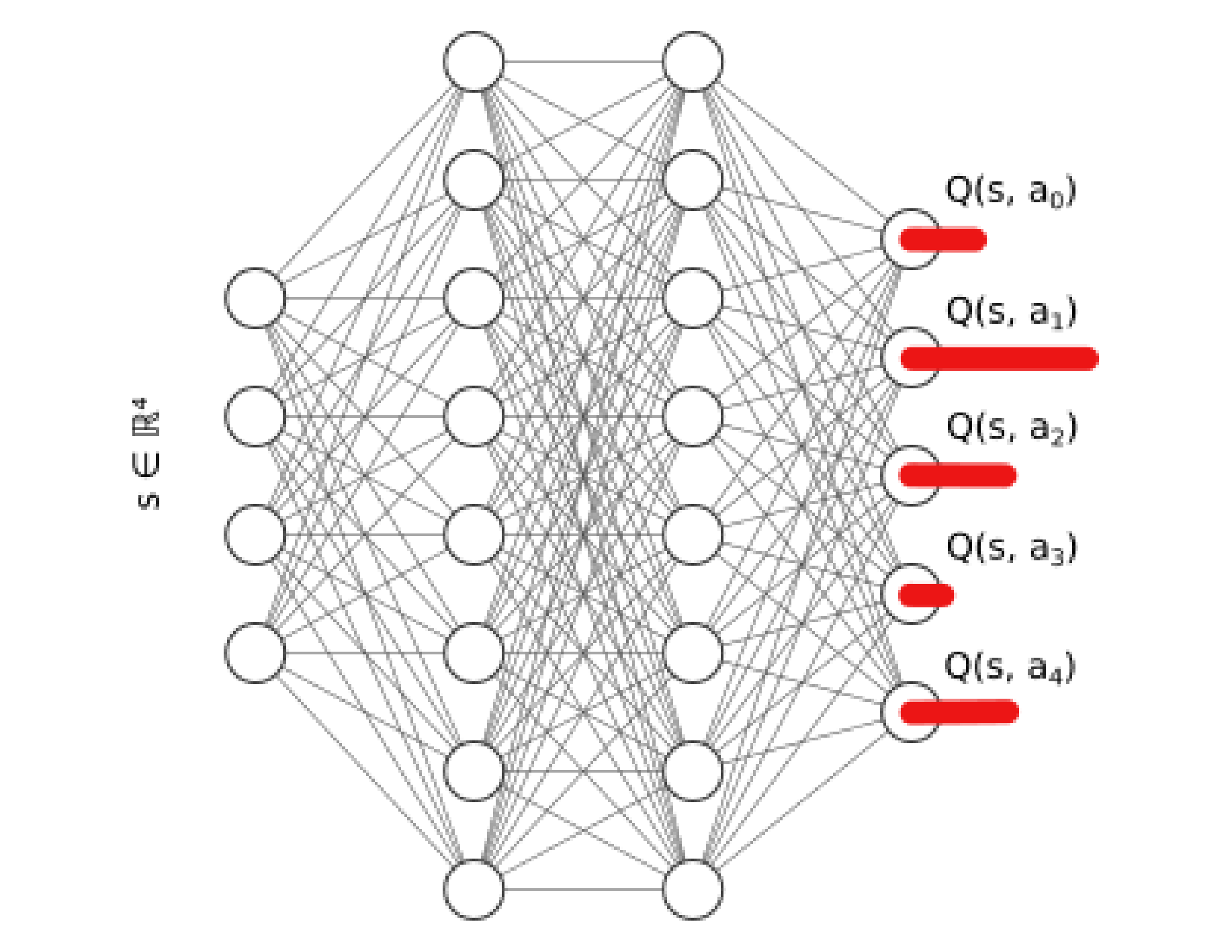
RL based Algorithm (PPO, DQN, SAC ..) which I applied to manipulation tasks, Optimal Control and MPC, which I applied to robot locomotion. Also used with reactive controller (TSID)
Toolkit
Working Experience
2024
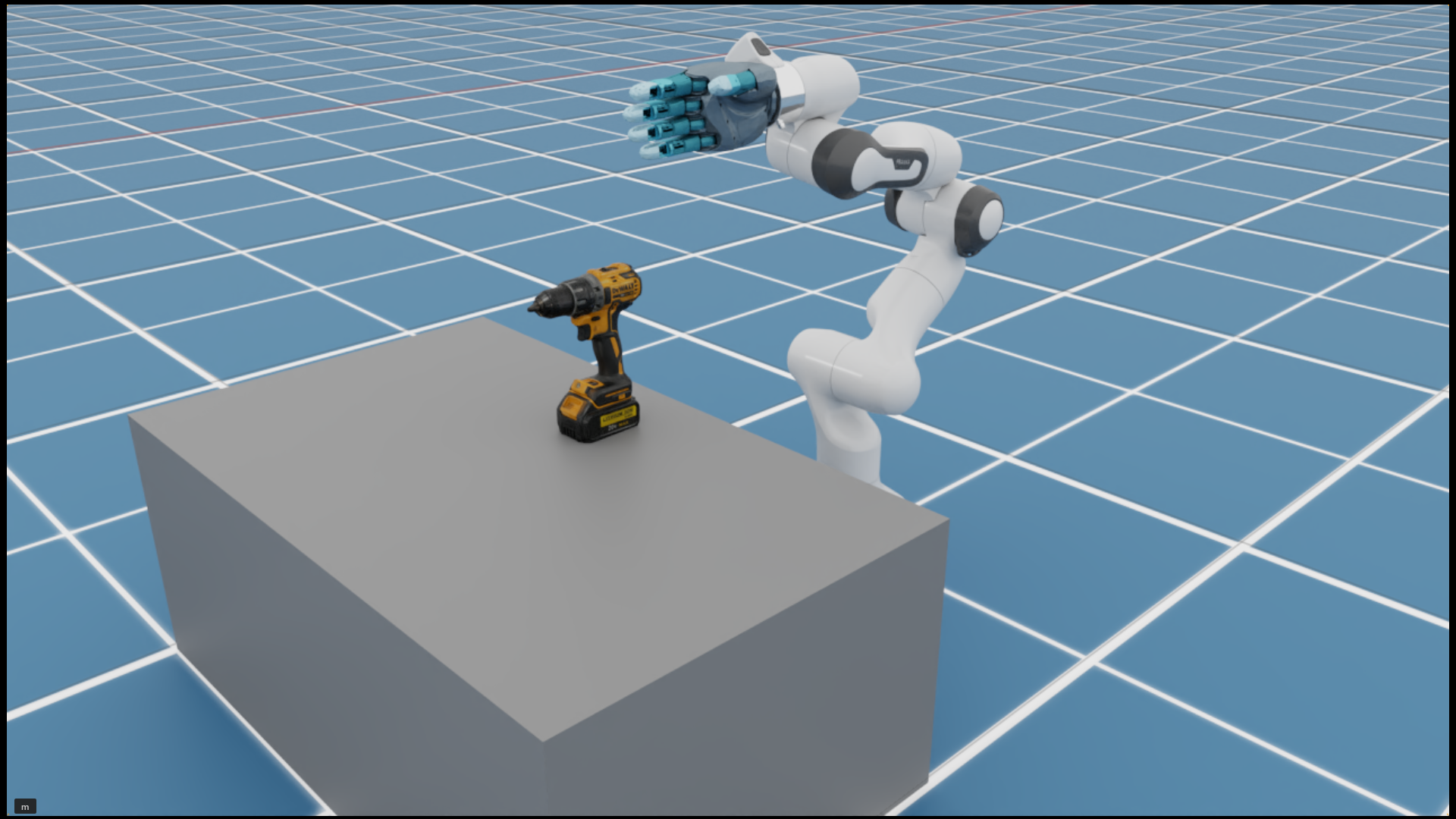
Robotics Engineer · MS Thesis Internship
Agile Robots AG, Munich, Germany
Reinforcement Learning based Task Oriented Grasping with multi fingered robotics hand
- Reinforcement Learning task set up in Isaac Sim
- Developed a custom PPO implementation to leverage demonstrations
- Behavioral cloning pretraining
2022
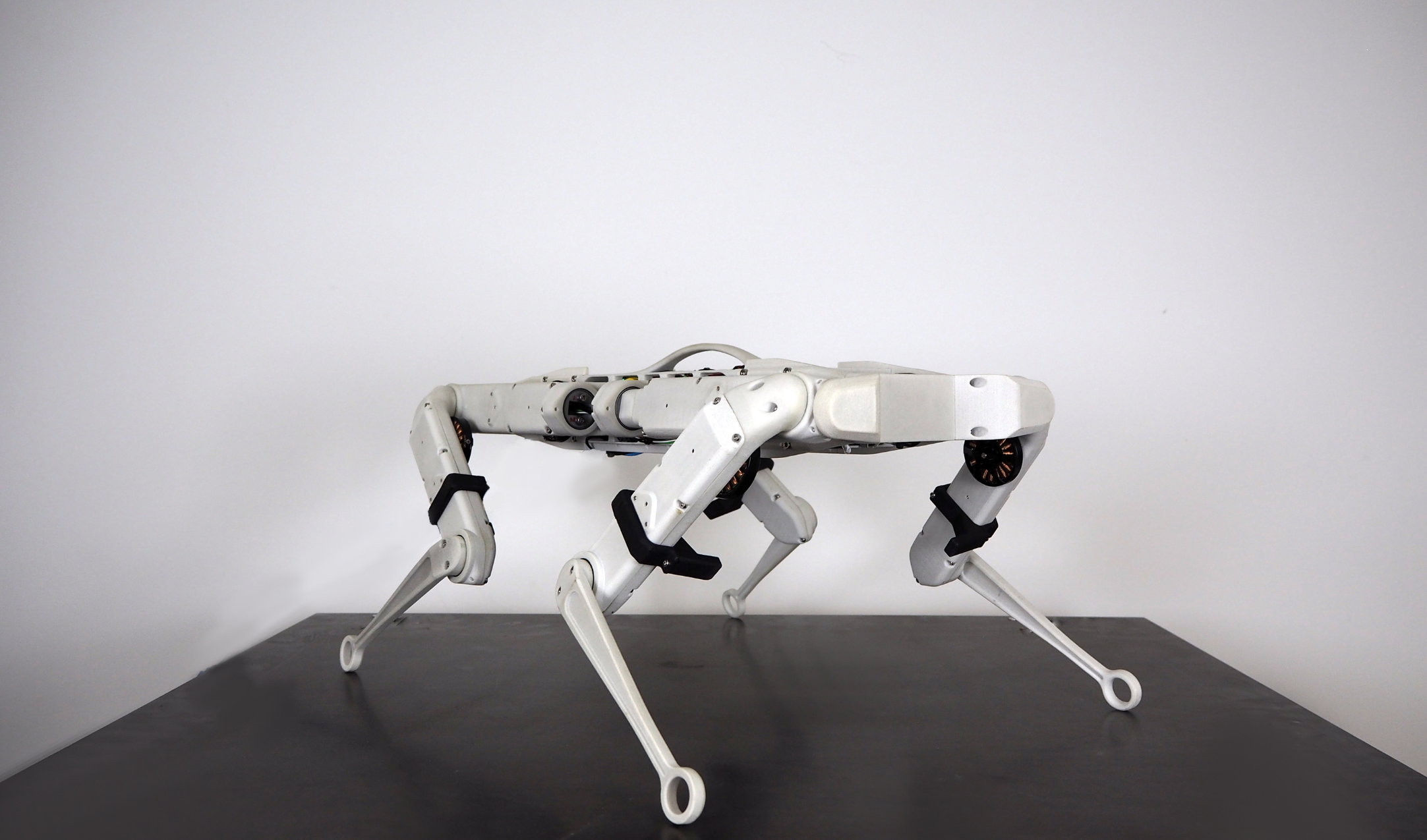
Robotics Engineer · Internship
Laas CNRS, Toulouse, France
Whole body MPC for quadruped robot locomotion
- Designed the algorithm to work on cheap actuators using PD+ low level controller
- Lowered the computational cost to run online the algorithm at 100Hz
- Performed locomotion in a PyBullet simulator environment
- Obtained walking behaviour, on the real hardware
2021
Industrial AI Challenge · Contract
Hub Innovazione Trentino, Trento, Italy
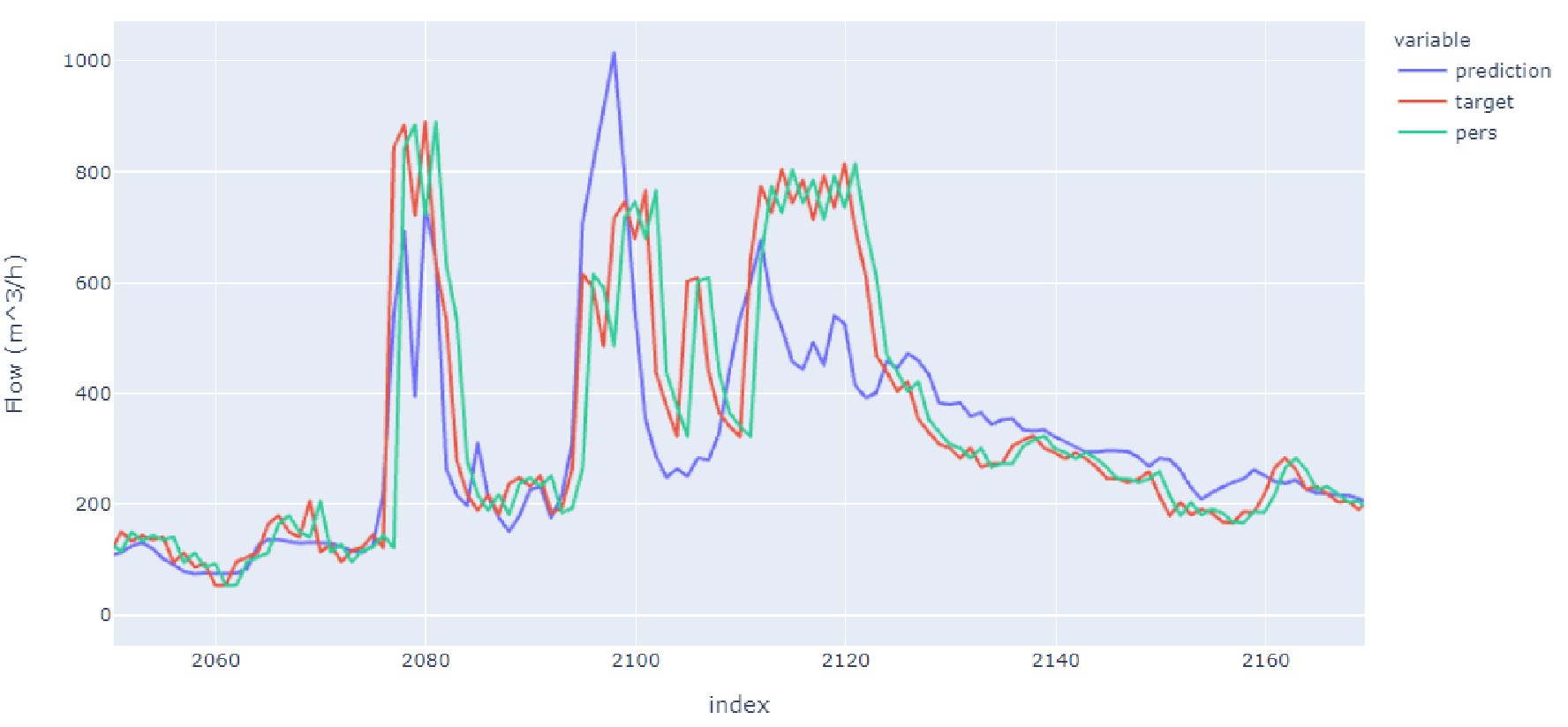
Developing a water flow forecasting algorithm for energy efficiency in water tratment plants
- Explored and evaluated various algorithms, including XGBoost, Temporal Convolutional Network (TCN), LSTM
- Developed forecasting models that accurately predicts incoming water volume, contributing to an effcient management of the water treatment process
- Comparative analysis enabled identification of the most suitable algorithm for the company’s needs
2018
Project Manager composites materials
E-agle trento Racing Team, Trento, Italy
Whole body MPC for quadruped robot locomotion
- Evaluate design feasibility of carbon fiber components
- Deal with sponsors and partners to ensure parts completion
- Moulding design for manufacturing
Education
2021
Mechatronics Engineering · Electronics & Robotics
University of Trento, Trento, Italy
Master Degree GPA 3.94/4.
- Optimisation based robot control
- Robotics perception and action
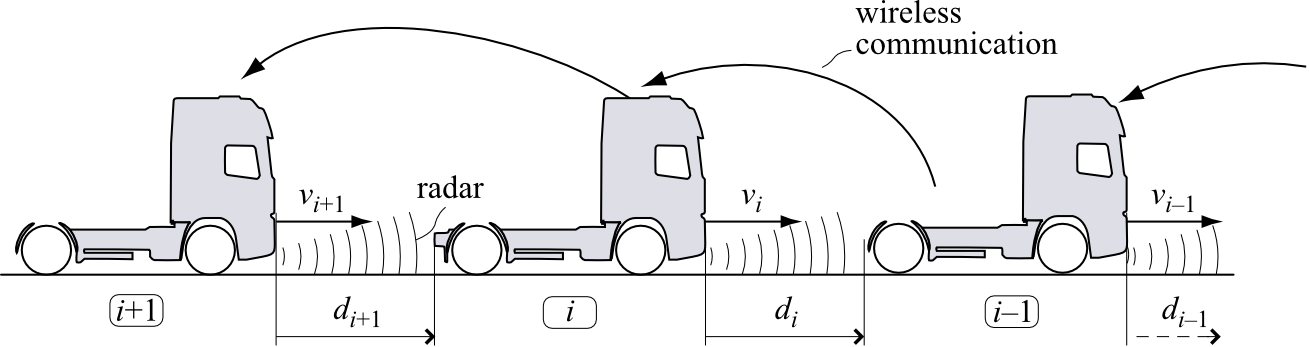
- Distributed estimation for robots and vehicles
- Modeling and simulation of mechatronics systems
2017
Industrial Engineering
University of Trento, Trento, Italy
Bachelor Degree
- Thesis in the implementation and comparison of different machine learning algorithms, like SVM, KNN, Random forest, LSTM for EMG signals classification
Get In Touch